QRB ROS NN Inference
Overview
qrb_ros_nn_inference is a ros2 package for performing neural network model, providing AI-based perception for robotics applications. qrb_ros_nn_inference offers hardware acceleration based on Qualcomm platforms, utilizing pre-trained models from the Qualcomm AI Hub to receive input tensor and output the prediction to output tensor.
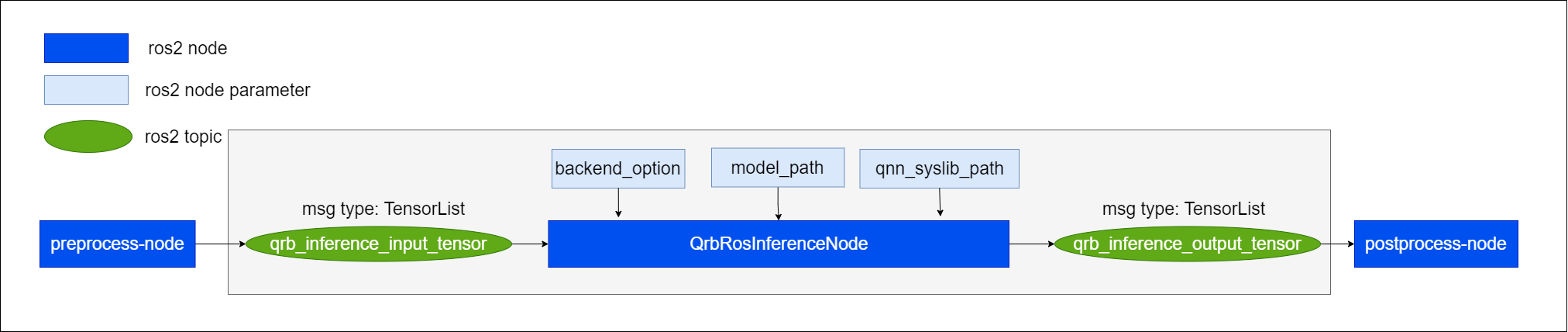
here comes the usage scenario of qrb_ros_nn_inference:
Note
TensorList is a custom ROS2 message type, more detail in qrb_ros_tensor_list_msgs.
qrb_ros_nn_inference is only for executing AI model inference, user should prepare a pre-process node and post-process node. pre-process node is for publishing the input data for model inference. post-process node is for analysis the raw output data after model inference.
Note
qrb_ros_nn_inference can be called in parallel.
Quickstart
Set up
Currently, we only support build with QCLINUX SDK.
Setup QCLINUX SDK environments follow this document: Set up the cross-compile environment
Create your
ros_wsdirectory in<qirp_decompressed_workspace>/qirp-sdk/
mkdir -p <qirp_decompressed_workspace>/qirp-sdk/ros_ws
Construct ROS pipeline
Clone your pre-process node and post-process node under
<qirp_decompressed_workspace>/qirp-sdk/ros_ws
cd <qirp_decompressed_workspace>/qirp-sdk/ros_ws && \ git clone https://github.com/my_github/pre-process_node.git && \ git clone https://github.com/my_github/post-process_node.git
Clone this repository and dependencies under
<qirp_decompressed_workspace>/qirp-sdk/ros_ws
cd <qirp_decompressed_workspace>/qirp-sdk/ros_ws && \ git clone https://github.com/quic-qrb-ros/qrb_ros_tensor_list_msgs.git && \ git clone https://github.com/quic-qrb-ros/qrb_ros_nn_inference.git
Dynamically add inference node into the ros2 component container in your launch file
ComposableNode( package = "qrb_ros_nn_inference", plugin = "qrb::ros::QrbRosInferenceNode", name='qrb_ros_nn_inference_node' )
Build your ROS pipeline
Colcon build your pipeline:
cd <qirp_decompressed_workspace>/qirp-sdk/ros_ws && \ export AMENT_PREFIX_PATH="${OECORE_TARGET_SYSROOT}/usr;${OECORE_NATIVE_SYSROOT}/usr" && \ export PYTHONPATH=${PYTHONPATH}:${OECORE_TARGET_SYSROOT}/usr/lib/python3.10/site-packages && \ colcon build --merge-install --cmake-args \ -DPython3_ROOT_DIR=${OECORE_TARGET_SYSROOT}/usr \ -DPython3_NumPy_INCLUDE_DIR=${OECORE_TARGET_SYSROOT}/usr/lib/python3.10/site-packages/numpy/core/include \ -DPYTHON_SOABI=cpython-310-aarch64-linux-gnu -DCMAKE_STAGING_PREFIX=$(pwd)/install \ -DCMAKE_PREFIX_PATH=$(pwd)/install/share \ -DBUILD_TESTING=OFF
Run
Source this file to set up the environment on your device:
ssh root@[ip-addr] (ssh) export HOME=/opt (ssh) source /opt/qcom/qirp-sdk/qirp-setup.sh (ssh) export ROS_DOMAIN_ID=xx (ssh) source /usr/bin/ros_setup.bash
Launch your inference pipeline
(ssh) ros2 launch ${package_name} ${launch-file}
Supported Platforms
This package is designed and tested to be compatible with ROS 2 Humble running on Qualcomm RB3 gen2.
Hardware |
Software |
|---|---|
LE.QCROBOTICS.1.0 |
Resources
Qualcomm AI Hub: AI models optimized and validated by Qualcomm Technologies.
Updates
Date |
Changes |
|---|---|
2024/07/17 |
Initial release |
2024/08/26 |
Update version 1.1.0 |