Environment setup
This information provides instructions on how to download and use the robotics prebuilt package, allowing you to quickly set up the software and hardware environment to get an out-of-the-box experience. The prebuilt package includes:
Robotics image: An image based on the Qualcomm Linux release with the ROS core packages added and the QIRP SDK included by default. You can directly use the robotics image to get an out-of-the-box experience.
QIRP SDK: Provides not only a runtime installation package with the out-of-the-box experience, but also a cross-compilation toolchain. Using that toolchain, you can quickly develop an application based on the sample code.
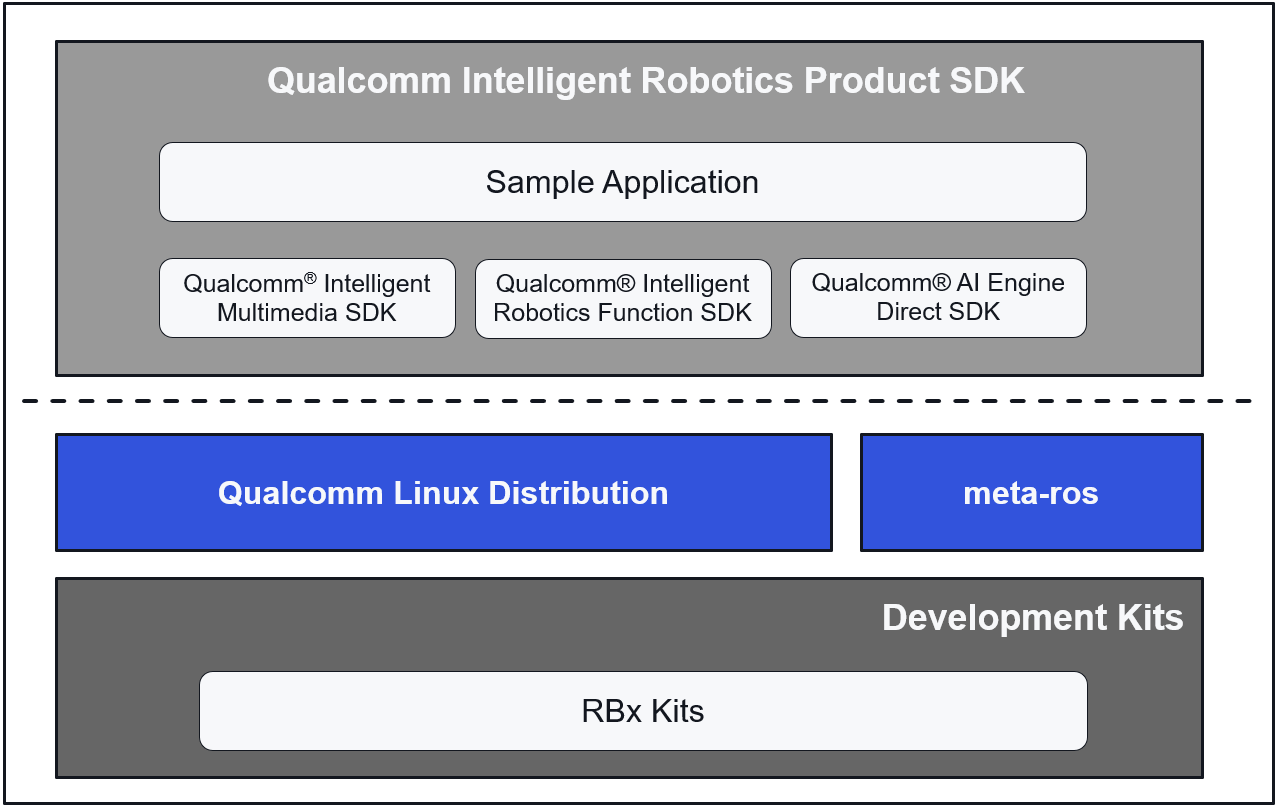
The figure shows the overall software architecture of the QIRP SDK:
Prerequisites
QIRP SDK supports RB3 Gen2 Development Kit. Please set up your hardware with Qualcomm® RB3 Gen2 Development Kit Quick Start Guide.
To access the document, please complete the registration of Qualcomm account on Qualcomm® website.
Steps
Download the prebuilt package.
wget https://artifacts.codelinaro.org/artifactory/qli-ci/flashable-binaries/qirpsdk/qcm6490/x86/<robotics-product-sdk>Note
<robotics-product-sdk>indicates the version of the zip file, such asqcom-6.6.28-QLI.1.1-Ver.1.1_robotics-product-sdk-1.1.zip.Extract the package with the following command:
unzip qcom-6.6.28-QLI.1.1-Ver.1.1_robotics-product-sdk-1.1.zipThe contents and their respective locations are listed in this table:
Content type
File or directory name
location
Robotics image
qcom-robotics-full-image
<decompressed_workspace >/target/qcm6490
QIRP SDK
qirp-sdk_<version>.tar.gz
<decompressed_workspace >/target/qcm6490/qirpsdk_artifacts
Build a standalone QDL by completing the following steps, which are described in How to build a standalone QDL.
Install dependent packages.
Download and compile the Linux flashing tool (QDL).
Force the device to enter EDL mode to enable software flashing with the steps described in Emergency download (EDL) mode.
Flash the robotics image to the device using the generated QDL.
Note
The QDL for robotics SDK is generated in a different path. Ensure to use the following commands to flash QDL to the device, where
<prebuilt_package_extracted_path>indicates the root path of the extracted prebuilt package../qdl --storage ufs --include <prebuilt_package_extracted_path>/target/qcm6490/qcom-robotics-full-image \ <prebuilt_package_extracted_path>/target/qcm6490/qcom-robotics-full-image/prog_firehose_ddr.elf \ <prebuilt_package_extracted_path>/target/qcm6490/qcom-robotics-full-image/rawprogram*.xml \ <prebuilt_package_extracted_path>/target/qcm6490/qcom-robotics-full-image/patch*.xml
Set up the cross-compile environment in QIRP SDK using the following command.
Note
QIRP SDK integrates the cross-compile toolchain, which includes common build tools, such as aarch64-oe-linux-gcc, make, cmake, and ROS core.
cd <qirp_decompressed_workspace>/qirp-sdk source setup.sh